
Suena lógico el buscar una forma para diseñar y construir mecanismos que puedan reconocer patrones porque de una forma u otra es uno de los mecanismos naturales que utilizamos a diario y gracias a nuestros sentidos. La automatización o mecanización de estos procesos nos ayudaría a realizar labores repetitivas (``sensitivas'' )en las que usamos nuestros sentidos cambiando, el tacto, el olfato o el oído por sensores que ayudarían a escoger o categorizar objetos quizás en una forma más práctica y con menos errores. En el caso de la música o de las artes nos ayudaría significativamente en el proceso de interacción. Actualmente existen aplicaciones que van desde reconocimiento de voz automatizado, reconocimiento de huellas digitales, reconocimiento de caracteres ópticos, identificación de sucesiones de ADN y mucho más.
Sin embargo existen numerosas restricciones en la traducción del mundo humano al de la maquina imponiendo problemas de cuantificación, cualificación y representación en campos tan diversos o tan obvios como por ejemplo en los campos de reconocimiento visual o de voz. Para sobrepasar estas barreras, investigaciones en el área de aprendizaje automático ilustran sobre como muchas de estas limitaciones podrían ser resueltas gracias a un conocimiento previo o anticipado del problema y sobre todo de como nuestra propia mente o naturaleza humana analiza, sintetiza y resuelve las incógnitas relevantes en el caso de la vida real. Por lo tanto es evidente analizar este fenómeno en la naturaleza y traducirlo en forma de algoritmos para poder diseñar sistemas especializados a una tarea de reconocer patrones específicos. De aquí que las artes jueguen un papel primordial en este campo por lo que están basadas en los sentidos del cuerpo humano.
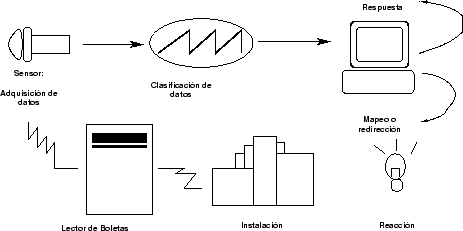
Para ilustrar este caso vale la pena imaginarnos el diseño de un sistema especifico para reconocer boletas o tarjetas para entrar a una instalación de un museo (ver figura 2). De acuerdo al color o la forma de la boleta, los artefactos de la instalación reaccionarían de diferentes maneras. Para esto se necesita un foto sensor ajustado a un rango especifico de colores que son nuestras categorías. En la calibración del sensor habría que tener un intervalo amplio para aceptar opciones como el caso de que algún visitante curioso quisiera introducir varias o un grupo de tarjetas en lugar de una sola. También es claro el caso de la tarjeta vieja, de la adulterada como también el de la tarjeta falsa. Una vez leídas y entradas, las categorías son clasificadas en grupos que son almacenados en un algoritmo llamado conjunto de entrenamiento o conjunto de aprendizaje donde además están acompañados por otro grupo de reglas con las que se van a comparar los patrones que percibe la instalación por medio de sus sensores. De acuerdo a la comparación entre la clasificación de patrones obtenidos por el sensor y con las reglas clasificación la instalación responde al visitante.
DEFINICIÓN DE TELESALUD
La telesalud es la utilización de la tecnología de la información y las comunicaciones para proporcionar salud y servicios de atención médica e información a grandes y pequeñas distancias
UTILIZACIÓN
DE LA TELESALUD
También tiene el beneficio agregado de que los pacientes pueden convertirse con más facilidad en participantes activos de su propio bienestar y pueden seguir programas educativos destinados a fomentar el bienestar desde la comodidad, conveniencia y seguridad de sus propios hogares. Aunque esta declaración se centra principalmente en los contactos con telesalud entre pacientes y profesionales de la salud, se debe hacer notar que otro aspecto importante de la telesalud es el uso de la telecomunicación entre los profesionales de la salud cuando prestan atención médica.
También tiene el beneficio agregado de que los pacientes pueden convertirse con más facilidad en participantes activos de su propio bienestar y pueden seguir programas educativos destinados a fomentar el bienestar desde la comodidad, conveniencia y seguridad de sus propios hogares. Aunque esta declaración se centra principalmente en los contactos con telesalud entre pacientes y profesionales de la salud, se debe hacer notar que otro aspecto importante de la telesalud es el uso de la telecomunicación entre los profesionales de la salud cuando prestan atención médica
LEYES DE LA ROBOTICA
- 1. Un robot no puede hacer daño a un ser humano, o, por medio de la inacción, permitir que un ser humano sea lesionado: Esto quiere decir que los robots están siendo creados para nuestro beneficio, entonces no existe lógica que si algo es creado para nuestro beneficio nos haga daño; porque ya no serian de nuestra utilidad si no que nos harían daño.
- 2. Un robot debe obedecer las órdenes recibidas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la Primera Ley: Los robots fueron creados para obedecer las normas impuestas por los seres humanos, sin que lo que hagan los robots afecten la integridad de un ser humano.
- 3. Un robot debe proteger su propia existencia en la medida en que esta protección no sea incompatible con la Primera o la Segunda Ley: Un robot tiene el derecho de defenderse de lo que no le parezca lógico que le hagan pero no puede afectar la integridad física de un ser humano.
- APLICACIONES DE LA ROBOTICA
- EN LA INDUSTRIA:
- Almacenamiento, carga y descarga de objetos. Casi todas las empresas industriales necesitan un espacio para almacenar las materias primas y los productos elaborados.
Cuanto mayor sea el trabajo de almacenamiento, más justificado está el uso de sistemas automáticos que clasifican y almacenan estos elementos. Estos sistemas combinan una estructura tridimensional de baldas y estanterías, en las que los objetos son colocados siguiendo un patrón de clasificación.
Cada una de las ubicaciones son memorizadas en un sistema informático, que es el que ordena a determinados robots móviles la inserción o extracción de los objetos, con una simple orden que contenga el código de ubicación del material.
- Operaciones industriales de mecanización. En industrias de automoción y fabricación de maquinaria en serie, los robots son de enorme utilidad en operaciones como:
- Ensamble y soldadura de piezas.
- Recubrimientos y aplicación de pintura.
- Realización de taladros, remachado.
- Operaciones de atornillado o enroscado.
- Fabricación de piezas torneadas.
- Corte de piezas mediante sierra o láser.
- Inspecciones en lugares inaccesibles. En ocasiones es necesario realizar tareas de limpieza y mantenimiento en lugares como tubos de aire acondicionado, alcantarillas, etc.
Para ello se utilizan robots dotados de un sistema de tracción adecuado a los que se les incorpora una cámara. Así se puede obtener una visión del recorrido que sigue el robot.
- Manipulación de residuos tóxicos o peligrosos. Las industrias que generan residuos altamente tóxicos, como las industrias químicas o las que trabajan con material radiactivo, requieren la utilización de robots para el traslado y manipulación de este tipo de materiales, ya que no es posible que una persona opere en estos ambientes de trabajo.
- Manipuladores en la industria alimentaria. Es cada vez mayor la utilización de robots dedicados a los trabajos de poda de arbustos y árboles, recolectores de fruta, preparadores y cortadores de animales en piezas en la industria cárnica, etc.
- Limpieza de ríos y puertos. Este tipo de trabajos requiere robots que se sumerjan en el fondo fluvial o marino. También suelen incorporar, además de medios submarinos de impulsión, cámaras de observación para visualizar desde el centro de control del robot.
- Almacenamiento, carga y descarga de objetos. Casi todas las empresas industriales necesitan un espacio para almacenar las materias primas y los productos elaborados.
- EN LA INDUSTRIA:
- EN LOS LABORATORIOS
- Los robots están encontrando un gran número de aplicaciones en los laboratorios